
The Voyis Discovery Vision System inspects a large underwater structure.
From Offshore by Chris Gilson and Patricia Sestari, Voyis Imaging
New technology employs edge computing to capture high-quality stills images in tandem with low-latency video
Subsea inspection operations are an intricate task that have historically required specialized knowledge and complex technology.
ROVs are a critical tool for underwater exploration, inspection and maintenance, but their effectiveness is driven by the quality of their vision systems.
Current ROV cameras prioritize vehicle piloting and situational awareness, which are the most immediate needs of the operators.
However, when both piloting and inspection confidence can be significantly enhanced with 3D information, the industry should seek to adopt new approaches.
Voyis is excited to announce the launch of the new Discovery Vision System, to address the trade-off that is currently made between Piloting Cameras and 3D Inspection Cameras for subsea operations.
Voyis, a company specializing in underwater optical imaging and 3D modeling, has advanced ROV vision systems with new computer vision technology.
The goal was to create a vision platform that could capture both low-latency enhanced video for piloting while simultaneously capturing high-quality stills images for real-time 3D modeling.
The company sought a solution that could generate incredible 3D reconstructions in real time without specialized technicians or expensive third-party processing.
By leveraging edge computing, Voyis' Discovery Vision System streams both crisp 4K piloting video and 3D point cloud data for complete situational awareness, addressing the compromise between piloting cameras and inspection cameras.
Piloting cameras prioritize low-latency video, at the expense of the image data required for 3D modeling.
Conversely, inspection cameras prioritize image data at the expense of piloting effectiveness, limited by their higher latency and a smaller field of view.
The goal was to create a vision platform that could capture both low-latency enhanced video for piloting while simultaneously capturing high-quality stills images for real-time 3D modeling.
The company sought a solution that could generate incredible 3D reconstructions in real time without specialized technicians or expensive third-party processing.
By leveraging edge computing, Voyis' Discovery Vision System streams both crisp 4K piloting video and 3D point cloud data for complete situational awareness, addressing the compromise between piloting cameras and inspection cameras.
Piloting cameras prioritize low-latency video, at the expense of the image data required for 3D modeling.
Conversely, inspection cameras prioritize image data at the expense of piloting effectiveness, limited by their higher latency and a smaller field of view.
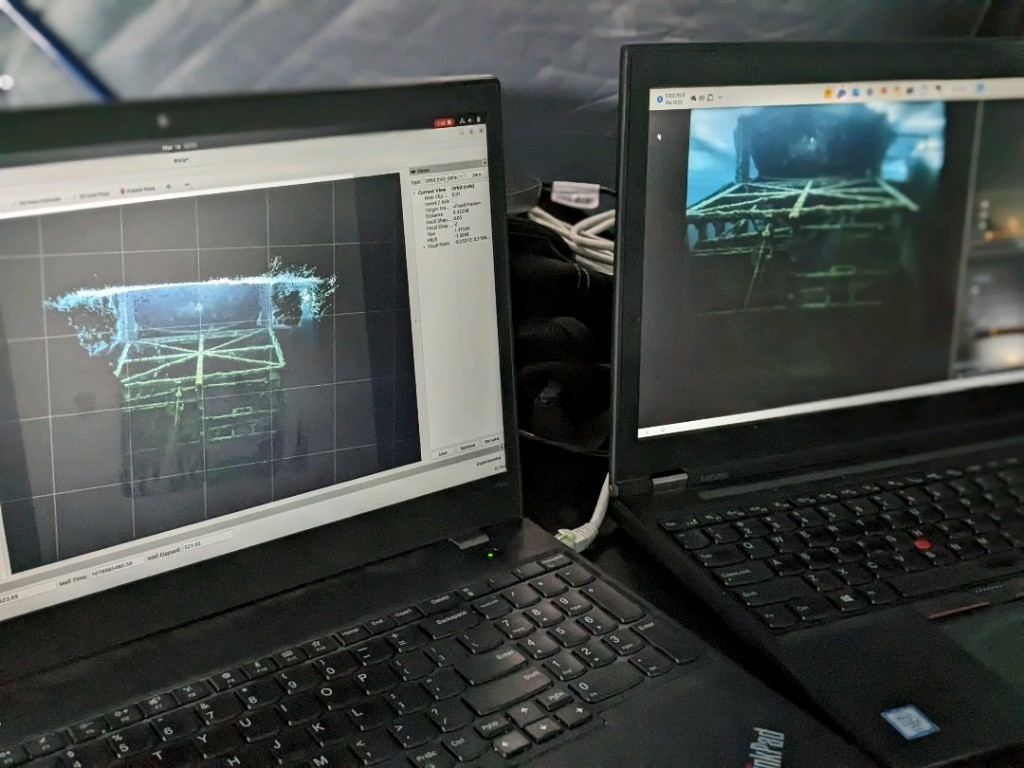
The software interface shows 3D model and stills images captured by Voyis Discovery Vision System in real time.

This 3D model was generated by Voyis Discovery Stereo.
Case study

Voyis Discovery and Discovery Stereo have been integrated into the VideoRay Defender ROV.
The Discovery’s capabilities were evaluated on a trial project where an uncharted flooded quarry was explored for the first time during the Canadian winter.
A VideoRay Defender ROV was outfitted with the vision system and deployed through a hole cut in the ice.
The 4K video stream enabled effective piloting to identify a target, while the instantaneous 3D point cloud data was leveraged to evaluate data quality, coverage and to maintain a consistent target range using the added depth perception.
A complete 3D reconstruction was quickly generated using a selected segment of the dataset, attaining a comprehensive set of qualitative and quantitative visual data on the subsea asset—crisp video, high-resolution stills images and an accurate 3D model.
This delivered a complete understanding of the structure and an assessment of its condition.
The system was easily integrated using the vehicle’s existing power and ethernet infrastructure, rapidly deploying this new capability on the small platform.
The Nova Mini lights provided high-intensity, uniform lighting that drastically improved the quality and clarity of the images compared to the standard piloting camera.
In a single day, the Voyis team was able to effectively integrate and operationalize the Discovery in a new environment to acquire an accurate 3D reconstruction of a subsea asset.
The success of the Discovery Vision System highlights its potential to revolutionize subsea inspections and ROV operations, a capability available for small platforms using the compact 300-m Discovery Camera and on large work class ROVs with the 4,000-m Discovery Stereo.
By employing edge computing to capture high-quality stills images in tandem with low-latency video, it achieves a vision system without comprise.
It is now possible for every subsea vehicle to see the depths like the surface is seen.
A VideoRay Defender ROV was outfitted with the vision system and deployed through a hole cut in the ice.
The 4K video stream enabled effective piloting to identify a target, while the instantaneous 3D point cloud data was leveraged to evaluate data quality, coverage and to maintain a consistent target range using the added depth perception.
A complete 3D reconstruction was quickly generated using a selected segment of the dataset, attaining a comprehensive set of qualitative and quantitative visual data on the subsea asset—crisp video, high-resolution stills images and an accurate 3D model.
This delivered a complete understanding of the structure and an assessment of its condition.
The system was easily integrated using the vehicle’s existing power and ethernet infrastructure, rapidly deploying this new capability on the small platform.
The Nova Mini lights provided high-intensity, uniform lighting that drastically improved the quality and clarity of the images compared to the standard piloting camera.
In a single day, the Voyis team was able to effectively integrate and operationalize the Discovery in a new environment to acquire an accurate 3D reconstruction of a subsea asset.
The success of the Discovery Vision System highlights its potential to revolutionize subsea inspections and ROV operations, a capability available for small platforms using the compact 300-m Discovery Camera and on large work class ROVs with the 4,000-m Discovery Stereo.
By employing edge computing to capture high-quality stills images in tandem with low-latency video, it achieves a vision system without comprise.
It is now possible for every subsea vehicle to see the depths like the surface is seen.
Links :
- Offshore Engineer : Voyis Launches Advanced Vision System for Subsea ROVs
No comments:
Post a Comment