Flying fish can make powerful, self-propelled leaps out of water into air, where their long, wing-like fins enable gliding flight for considerable distances.
It appears these Flying Fish are in a no win situation, picked off above the surface by Frigatebirds and devoured underwater by the Dorado.
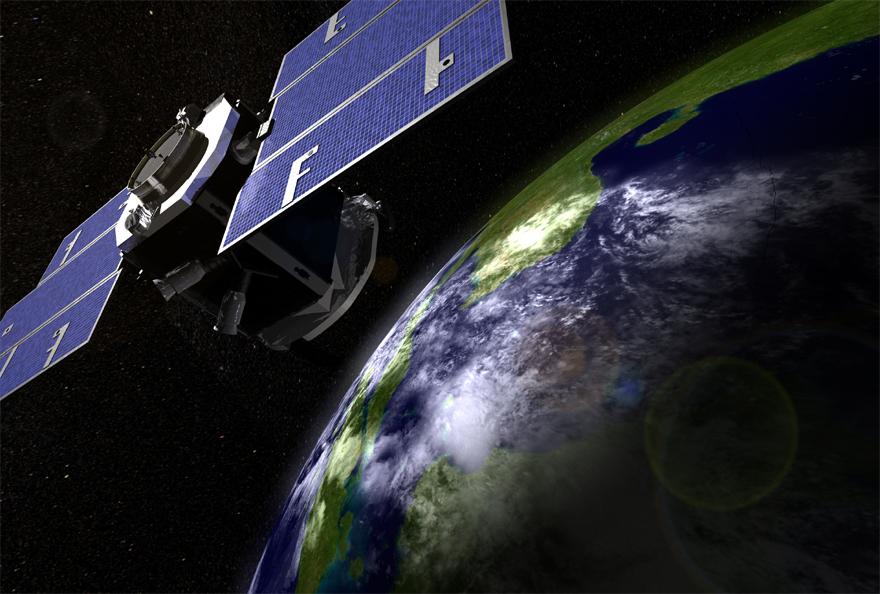
An artist’s concept shows NASA’s CloudSat spacecraft in orbit above Earth. Launched in 2006, it provided the first global survey of cloud properties before being decommissioned in March 2024 at the end of its lifespan. NASA/JPL
Over the course of nearly two decades, its powerful radar provided never-before-seen details of clouds and helped advance global weather and climate predictions.
CloudSat, a NASA mission that peered into hurricanes, tallied global snowfall rates, and achieved other weather and climate firsts, has ended its operations. Originally proposed as a 22-month mission, the spacecraft was recently decommissioned after almost 18 years observing the vertical structure and ice/water content of clouds.
As planned, the spacecraft — having reached the end of its lifespan and no longer able to make regular observations — was lowered into an orbit last month that will result in its eventual disintegration in the atmosphere.
When launched in 2006, the mission’s Cloud Profiling Radar was the first-ever 94 GHz wavelength (W-band) radar to fly in space. A thousand times more sensitive than typical ground-based weather radars, it yielded a new vision of clouds — not as flat images on a screen but as 3D slices of atmosphere bristling with ice and rain.
For the first time, scientists could observe clouds and precipitation together, said Graeme Stephens, the mission’s principal investigator at NASA’s Jet Propulsion Laboratory in Southern California. “Without clouds, humans wouldn’t exist, because they provide the freshwater that life as we know it requires,” he said. “We sometimes refer to them as clever little devils because of their confounding properties. Clouds have been an enigma in terms of predicting climate change.”
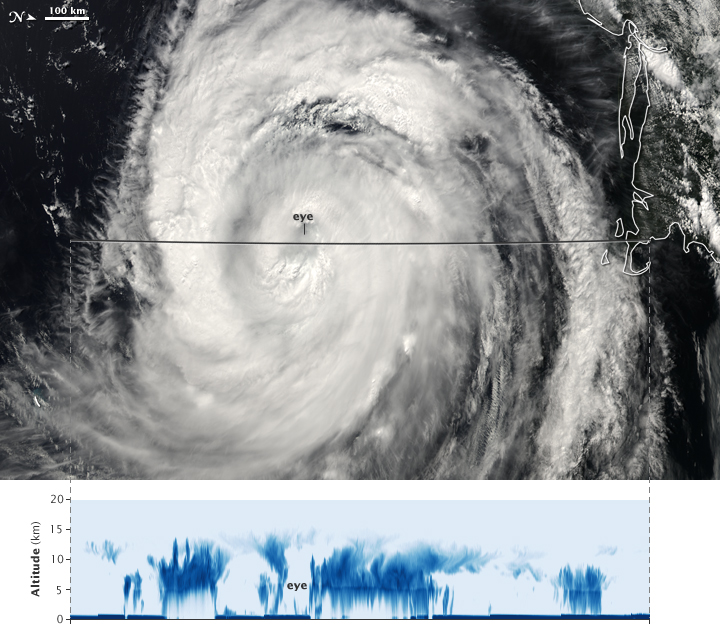
NASA’s CloudSat passed over Hurricane Bill near the U.S. East Coast in August 2009, capturing data from the Category 4 storm’s eye. This pair of images shows a view from the agency’s Aqua satellite (top) along with the vertical structure of the clouds measured by CloudSat’s radar (bottom). Jesse Allen, NASA Earth Observatory
Clouds have long held many secrets. Before CloudSat, we didn’t know how often clouds produce rain and snow on a global basis. Since its launch, we’ve also come a long way in understanding how clouds are able to cool and heat the atmosphere and surface, as well as how they can cause aircraft icing.
CloudSat data has informed thousands of research publications and continues to help scientists make key discoveries, including how much ice and water clouds contain globally and how, by trapping heat in the atmosphere, clouds accelerate the melting of ice in Greenland and at the poles.
Weathering the Storm
Over the years, CloudSat flew over powerful storm systems with names like Maria, Harvey, and Sandy, peeking beneath their swirling canopies of cirrus clouds. Its Cloud Profiling Radar excelled at penetrating cloud layers to help scientists explore how and why tropical cyclones intensify.
In this animation, CloudSat’s radar slices into Hurricane Maria as it rapidly intensifies in the Atlantic Ocean in September 2017.
Areas of high reflectivity, shown in red and pink, extend above 9 miles (15 kilometers) in height, indicating large amounts of water being drawn upward high into the atmosphere.
Credit: NASA/JPL-Caltech/CIRA
Across the life of CloudSat, several potentially mission-ending issues occurred related to the spacecraft’s battery and to the reaction wheels used to control the satellite’s orientation. The CloudSat team developed unique solutions, including “hibernating” the spacecraft during nondaylight portions of each orbit to conserve power, and orienting it with fewer reaction wheels. Their solutions allowed operations to continue until the Cloud Profiling Radar was permanently turned off in December 2023.
“It’s part of who we are as a NASA family that we have dedicated and talented teams that can do things that have never before been done,” said Deborah Vane, CloudSat’s project manager at JPL. “We recovered from these anomalies with techniques that no one has ever used before.”
NASA's CloudSat Sees Tropical Storm Harvey in 3D in 2017
Sister Satellites
CloudSat was launched on April 28, 2006, in tandem with a lidar-carrying satellite called CALIPSO (short for the Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observation). The two spacecraft joined an international constellation of weather- and climate-tracking satellites in Earth orbit.
Radar and lidar are considered “active” sensors because they direct beams of energy at Earth — radio waves in the case of CloudSat and laser light in the case of CALIPSO — and measure how the beams reflect off the clouds and fine particles (aerosols) in the atmosphere. Other orbiting science instruments use “passive” sensors that measure reflected sunlight or radiation emitted from Earth or clouds.
Orbiting less than a minute apart, CloudSat and CALIPSO circled the globe in Sun-synchronous orbits from the North to the South Pole, crossing the equator in the early afternoon and after midnight every day. Their overlapping radar-lidar footprint cut through the vertical structure of the atmosphere to study thin and thick clouds, as well as the layers of airborne particles such as dust, sea salt, ash, and soot that can influence cloud formation.
The influence of aerosols on clouds remains a key question for global warming projections. To explore this and other questions, the recently launched PACE satellite and future missions in NASA’s Earth System Observatory will build upon CloudSat’s and CALIPSO’s legacies for a new generation.
“Earth in 2030 will be different than Earth in 2000,” Stephens said. “The world has changed, and the climate has changed. Continuing these measurements will give us new insights into changing weather patterns.”
More About the Missions
The CloudSat Project is managed for NASA by JPL. JPL developed the Cloud Profiling Radar instrument with important hardware contributions from the Canadian Space Agency.
Colorado State University provides science data processing and distribution. BAE Systems of Broomfield, Colorado, designed and built the spacecraft. The U.S. Space Force and U.S. Department of Energy contributed resources. U.S. and international universities and research centers support the mission science team. Caltech in Pasadena, California, manages JPL for NASA.
CALIPSO, which was a joint mission between NASA and the French space agency, CNES (Centre National d’Études Spatiales), ended its mission in August 2023.
China's surveillance vessels have mapped Taiwan's coast as Beijing has increased the use of research ships for war preparation, according to a new report.
"The Zhu Hai Yun, which bristles with advanced monitoring and surveillance equipment, charted a course that appears intended to challenge Taiwan and probe the environment around the island," the report by the Centre for International and Strategic Studies (CSIS) said on February 26.
Described as "drone carrier," the Zhu Hai Yun was built by China State Shipbuilding Corporation and owned by Southern Marine Science and Engineering Guangdong Laboratory (Zhuhai), also known as the "Southern Ocean Laboratory" of Sun Yat-sen University, according to a May 2022 report in Marine Executive, a specialist publication on maritime affairs.
The vessel, which can controlled remotely and navigate autonomously in open water, was commissioned into service on January 12, 2023, Chinese state media outlet Global Times reported.
Beijing has increased the use of research vessels for missions in the Indian Ocean, which China says are for research purposes alone. In October 2023, controversy erupted after the Chinese research vessel Shi Yan 6 docked at the port in Sri Lanka's Colombo, which was protested by India. Experts have argued that vessels like Shi Yan 6 have links to the People's Liberation Army, Newsweek has previously reported.
Chinese research ship Shi Yan 6 proceeds to deck at a port in Colombo on October 25, 2023. China is increasingly using research vessels with links to the People's Liberation Army for gathering insights into Taiwan's military, a new report by the Center for International and Strategic Studies says.
Ishara S. Kodikara/Afp via Getty
"China's scientific research activities in relevant waters are for peaceful purposes and aimed at contributing to humanity's scientific understanding of the ocean. The activities are in strict compliance with the terms of the United Nations Convention on the Law of the Sea," Wang Wenbin, a spokesperson for the Chinese Foreign Ministry, said on February 6 during the regular press briefing.
The CSIS report, however, underscores the ship's activities as part of what experts describe as an "all-domain pressure campaign" by the People's Republic of China against Taiwan.
"This represents one more tool the People's Republic of China is using in what I call the all-domain pressure campaign against Taiwan," Christopher Sharman, director of the China Maritime Studies Institute at the US Naval War College, told the Financial Times.
The Zhu Hai Yun research vessel has links to the PLA, the CSIS report said.
"Records indicate that the Zhu Hai Yun was built by the 704th Research Institute, a subsidiary of the massive state-owned defense contractor China State Shipbuilding Corporation. In 2020, the U.S. Commerce Department placed the 704th Research Institute on its Entity List for illegally acquiring U.S.-origin equipment to support the PLA," it said.
The Zhu Hai Yun, equipped with advanced monitoring and surveillance equipment, undertook a path closely along Taiwan's coast, engaging in activities that suggest a deliberate attempt to challenge the island and probe its surrounding environment, the report said.
Notably, near Taiwan's northern coast, the vessel significantly reduced its speed, an action that CSIS interpreted as conducting a research operation. Furthermore, the ship's course took it into the contiguous zone of Taiwan, coming within 24 nautical miles of the shore, and at points appeared to cross into this sensitive area, the report added.
"Data accessed from the Windward intelligence platform reveals that, besides the Zhu Hai Yun, only two other Chinese research vessels since 2015 have operated along Taiwan's east coast in a manner that was not suggestive of either direct transit or surveying the seabed for deposits of natural resources. Just one of those vessels, operating in 2021, circled Taiwan in a route similar to the Zhu Hai Yun's but did not venture nearly as close to the island," it said.
"I can see the PRC using this to penetrate the contiguous zone with a drone swarm to test Taiwan's response and that would greatly increase the risk of an incident," Sharman told the Financial Times.
Despite Chinese sources claiming that the Zhu Hai Yun's purpose is solely for civilian research, evidence suggests a blurred line between the vessel and the People's Liberation Army (PLA).
"In Dalian, the ship docked at a pier operated by the Dalian Institute of Measurement and Control Technology. One of the institute's primary roles is studying ship vibration and acoustics for the Chinese navy," the CSIS report said.
Zhu Hai Yun – chinese-built drone mothership boasts autonomous sailing systems
The Zhu Hai Yun is not just a simple research vessel; it carries unmanned surface vehicles (USVs) and undersea gliders equipped with technology such as side-scan sonar, identified by Chinese naval researchers as beneficial for detecting undersea mines and submarines, the report said. Aerial drones aboard the ship further extend its surveillance capabilities.
Furthermore, the Zhu Hai Yun's primary operator, the Southern Marine Science and Engineering Guangdong Laboratory (Zhuhai), underscores the vessel's links to China's military apparatus, being owned by the Zhuhai municipal government and managed by Sun Yat-sen University (SYSU), an institution with established connections to the PLA, the report said.
A navigational chart from the late Edo Period (1603-1867)
shows the disputed Takeshima islets as Japanese territory.
(Provided by the Japan Institute of International Affairs)
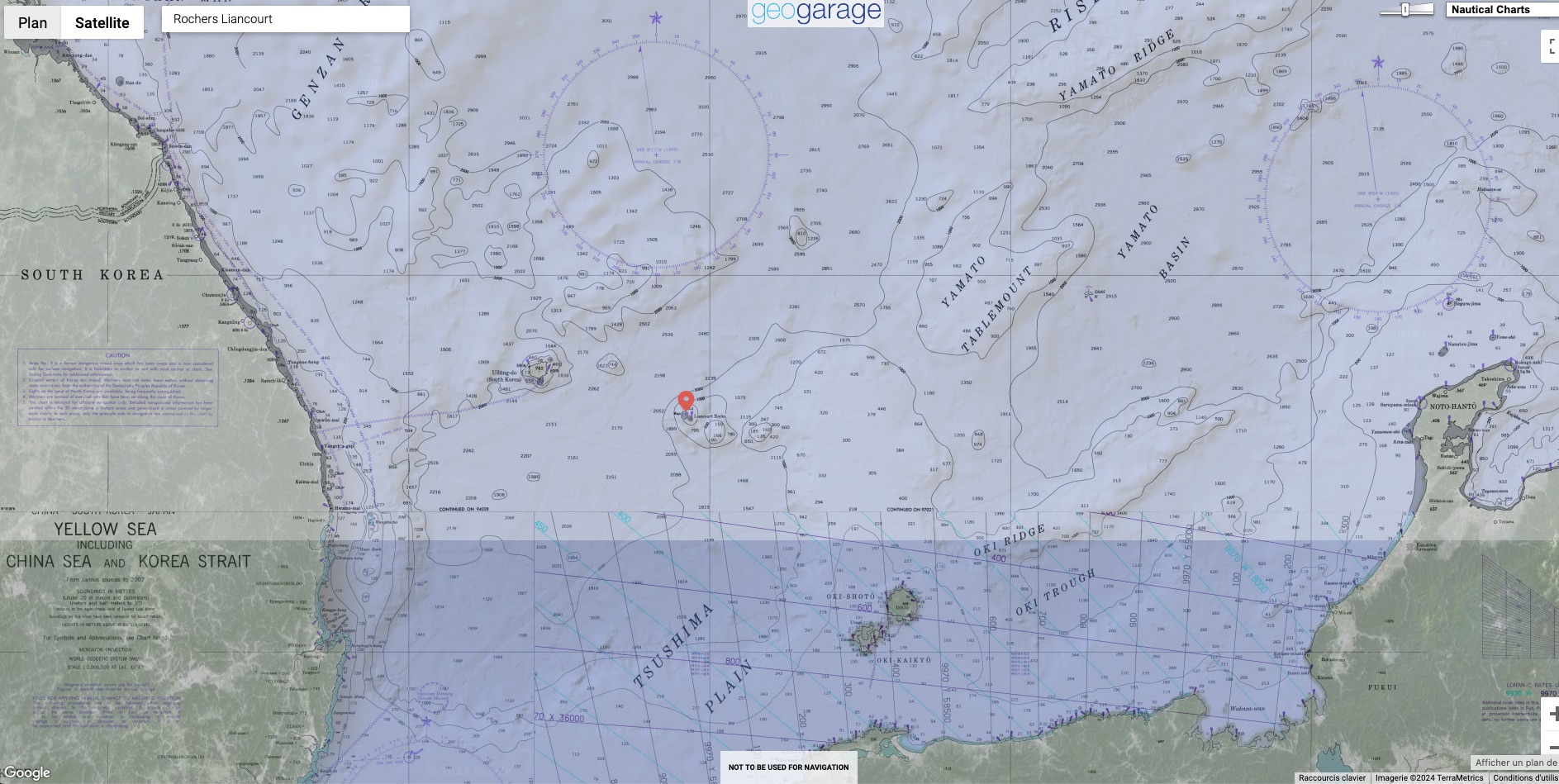
The disputed Takeshima islets are seen sandwiched between Japan’s Oki island group and South Korea’s Ullung-do island on a navigational chart from the late Edo Period (1603-1867).
South Korea’s foreign ministry summoned a Japanese diplomat on Tuesday to protest a claim in Japan’s annual diplomatic policy Bluebook over a group of islands between the countries at the center of a longstanding territorial row, Yonhap news reported.
Seoul’s official stance remains that Dokdo, which Japan claims as the Takeshima islands, is the “inherent territory” of South Korea.
Photo: AP
Earlier, South Korea’s foreign ministry said it “strongly protests” the claim made in the Diplomatic Bluebook issued by Japan on Tuesday and said the islands were historically and geographically its sovereign territory.
Localization with the GeoGarage platform (NGA nautical raster chart)
Rochers Liancourt with Google Earth satellite imagery
Official ENC from KHOA KR67BD58 at scale 1:5,000
While ties between the two countries have improved recently, the neighbors are at odds over the sovereignty of the islands called Dokdo in South Korea and Takeshima in Japan that lie about halfway between them.
The crew of a Korea Coast Guard ship unfurls banners carrying the phrase "Let's Overcome the Coronavirus" near the country's easternmost Dokdo Islets, in this file photo taken Sept. 2, 2021, eight days ahead of the 68th anniversary of Korea Coast Guard Day.
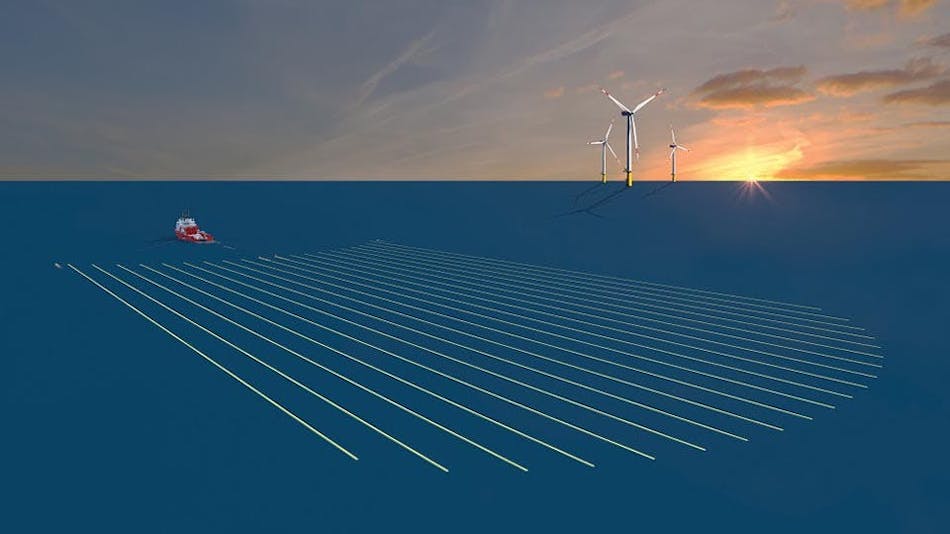
Geosciences sector proving its value across more than just the oil and gas industry CGG geoscience expert identifies multiple uses for offshore seismic and surveying services
The offshore geosciences sector has been increasingly adapting to meet other seismic and surveying needs outside of the oil and gas industry, with services such as geological and geophysical (G&G) surveys for offshore wind, geothermal and other types of seafloor surveys.
For instance, Kredo Offshore commissioned Fugro in late 2023 to perform metocean and wind measurements offshore Yeonggwang County in South Korea. Initial investigations are taking place at the project site to determine the suitability for an offshore wind development, with four Seawatch Lidar buoys deployed to take readings from wind, waves, current and meteorological conditions. Data collection will take place over 12 months, with real-time data supplied to Kredo and its consultants ahead of final reporting.
The SEAWATCH® Wind Lidar Buoy represents the next generation of multi-purpose buoys tailored
for the renewable energy industry.
The buoy accurately measures the speed and direction of wind across the diameter of wind turbine rotors, whilst sensors record oceanographic parameters such as ocean waves and current profiles.
The SEAWATCH® Wind Lidar Buoy is a cost-efficient way to measure wind data at heights of conventional offshore wind turbines for wind resource assessments and engineering design criteria.
In February 2024, PGS secured an offshore wind site characterization contract from an unnamed company for a project in Europe. PGS will mobilize a vessel early in July for the two-month acquisition program, deploying an ultrahigh-resolution 3D streamer. The aim is to provide more detailed subsurface data for shallower targets compared to conventional 2D and geotechnical surveys.
FWI technology
For the offshore oil and gas sector, CGG is working on the continued development of full waveform inversion (FWI) technology. These include more complex wavefield modeling, such as offered by elastic FWI, to improve models and images in more complex subsurface geology; pushing FWI to higher frequencies to greater detail at the reservoir and also for near-surface hazards; using 4D FWI for time-lapse reservoir monitoring direct imaging with FWI as a replacement for migration algorithms. However, according to the company, FWI technology can be applied to multiple offshore sectors.
“Reimaging of legacy seismic data is commonplace in the oil and gas industry, particularly when significant new technologies such as FWI become available. This is equally applicable to the cost-conscious offshore renewables market, where high-resolution reimaging of seismic data can be an alternative to acquiring and processing new datasets,” Marianne Lefdal, vice president of Geoscience Global Excellence with CGG, told Offshore.
She continued, “For example, high-frequency FWI and FWI imaging are capable of providing shallow near-surface hazard delineation for wind farm site surveys. In the case of CCUS, high-end reimaging can be combined with rapid interpretation of horizons and faults using machine learning to support screening studies in mature basins. In both examples, the integration of new technology with geoscience expertise is key to successful application for these specific use cases.”
Offshore wind
Sercel, the sensing and monitoring division of CGG, provides earth science, data science, sensing and monitoring services.
“In terms of adapting geophysical surveys to support energy transition projects, Sercel has a range of equipment solutions, which are perfectly suited to the subsurface monitoring of geothermal, CCUS and energy storage projects where high-quality marine streamer, OBN and downhole data will be critical for 4D monitoring,” Lefdal said.
Sercel and Kappa Offshore Solutions released PIKSEL in 2021. This compact marine seismic technology acquires data for high-resolution 3D imaging of targeted offshore areas. Kappa noted that the system was designed to improve the efficiency of geohazard assessment surveys, while also providing G&G data integration, which is relevant for the offshore renewable energy sector.
“For offshore renewables, Sercel has a compact marine seismic solution (PIKSEL), which is specially designed for acquiring the best seismic data for high-resolution 3D surveying and geotechnical services for offshore wind,” she said.
Morphosense provides structural monitoring instrumentation and digital twin solutions for the renewables, nuclear and defense sectors.
In March 2023, Sercel acquired Morphosense, a company that provides structural health monitoring and structural integrity management. At the time, Sercel said this addition allows it to access new market opportunities for the renewables, nuclear and defense sectors.
“Another aspect of offshore wind is the need to maximize the lifespan of assets like wind turbines exposed to challenging environmental conditions,” Lefdal continued. “Sercel has a range of structural health monitoring solutions, which collect precise real-time measurements of movement and vibrations for analysis and modeling. For offshore wind, its s-morpho sensors, AI-powered analysis and digital twin modeling solution can be used to identify signs of fatigue and wear and optimize preventive maintenance programs.”
Carbon storage
Utilizing its subsurface imaging technology, CGG supplies subsurface insights for carbon storage sites, which includes the initial site screening studies, 3D site characterization as well as planning the monitoring programs for injection and closure.
“We continue to look at how current technology in the oil and gas space can be re-focused to be applied to carbon storage such as 3D seismic imaging and 4D seismic monitoring, but also to continuously investigate what solutions are needed for the future,” Lefdal said.. “This R&D is designed to bring to production next-generation technology solutions that can answer the requirements of carbon storage whether they be driven by geology, regulations, cost structure or new data acquisition methods.”
In February of this year, CGG released its “Southeast Asia Carbon Storage Study” for the CCUS market. The study ranks and prioritizes opportunities at large scale across 58 basins in Indonesia, Malaysia, Thailand and Vietnam, covering a total surface area of more than 6 million square kilometers, with the aim to provide guidance in identifying the best basins and plays for potential carbon storage.
“We are continuing to expand our portfolio of carbon storage studies, with the recent addition of a ‘Southeast Asia Carbon Storage Study’ to our existing North Sea and US Gulf of Mexico,” Lefdal continued. “These involve the integration of geophysical, geological and data science expertise to create data-rich studies that provide a clear and reliable assessment of storage potential based on a proprietary quantitative and qualitative criteria-based screening methodology.”
The map provides an overview of the basins covered by the "Southeast Asia Carbon Storage Study" and a snapshot of storage play segmentation.
Geothermal
CGG has also been invested in geothermal resources research. Earlier this year, the company released a white paper on the potential of offshore geothermal energy as a future global resource. This occurred after completing global geothermal resource and associated lithium brine screening projects over the last three years.
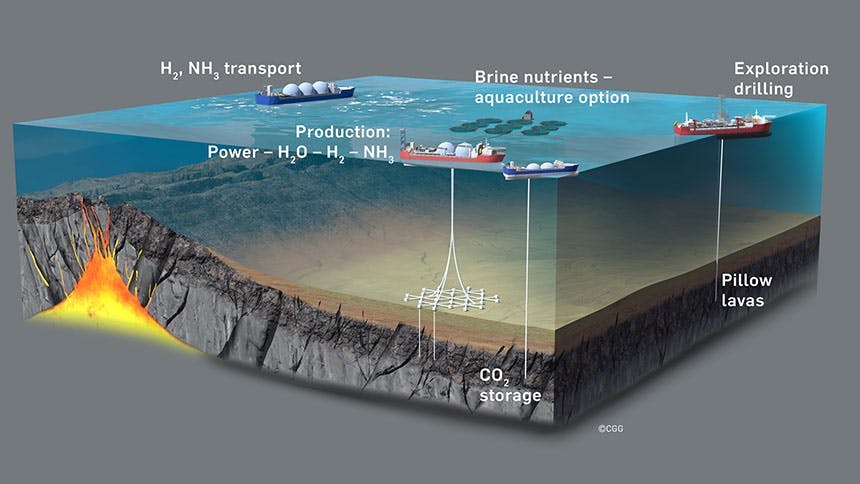
“This is an area where oil and gas geoscience, drilling and engineering expertise could be repurposed to tap vast geothermal resources along the magmatically active ocean floor spreading centers and adjacent flooded rift systems,” Lefdal said. “These offshore areas could be optimal locations to harvest geothermal resources for power in conjunction with the co-production of freshwater, green hydrogen, and ammonia, collectively creating an alternative set of rapidly scalable green energy solutions.”
She continued, “There are some clear needs for the efficient development of geothermal resources, which include delineating the geothermal ‘reservoir’ and identifying key features such as faults and fracture swarms which, depending on the geology, can either act as fluid conduits and provide permeability in igneous settings or can compartmentalize the reservoir in deep sedimentary basins.”
CGG has experience with more than 150 multiphysics projects for geothermal resource delineation. According to Lefdal, seismic imaging and attribute analysis will be needed to provide details on faults and fractures, using technologies like fault-constrained tomography and least-squares imaging.
The schematic highlights offshore geothermal resource exploration and development adjacent to sea floor spreading centers generating baseload power, fresh H2O, green H2 and NH3 with the potential for CO2 storage and controlled ocean fertilization.

 Chinese research ship Shi Yan 6 proceeds to deck at a port in Colombo on October 25, 2023.
Chinese research ship Shi Yan 6 proceeds to deck at a port in Colombo on October 25, 2023.

 A navigational chart from the late Edo Period (1603-1867)
A navigational chart from the late Edo Period (1603-1867)




 PIKSEL is Sercel's high-resolution 3D marine seismic technology.
PIKSEL is Sercel's high-resolution 3D marine seismic technology.

 Morphosense provides structural monitoring instrumentation and digital twin solutions for the renewables, nuclear and defense sectors.
Morphosense provides structural monitoring instrumentation and digital twin solutions for the renewables, nuclear and defense sectors.